ホンダとODOTのパイロットプロジェクトで道路損傷を高精度検出
ホンダとオハイオ州運輸局が主導するプロジェクトでは、道路の穴やガードレール損傷を最大93%の精度で検出。AIとセンサー活用で修理効率化とコスト削減を実現。詳細をチェック!
ホンダとオハイオ州運輸局(ODOT)が主導したパイロットプロジェクトでは、舗装の穴や損傷したガードレールを最大93%の精度で検出できるシステムが、数千マイルの道路でテストされました。このシステムは、年間数百万ドルの節約につながる可能性があります。このプロジェクトでは、車両が道路インフラの継続的な監視ツールとして機能しました。
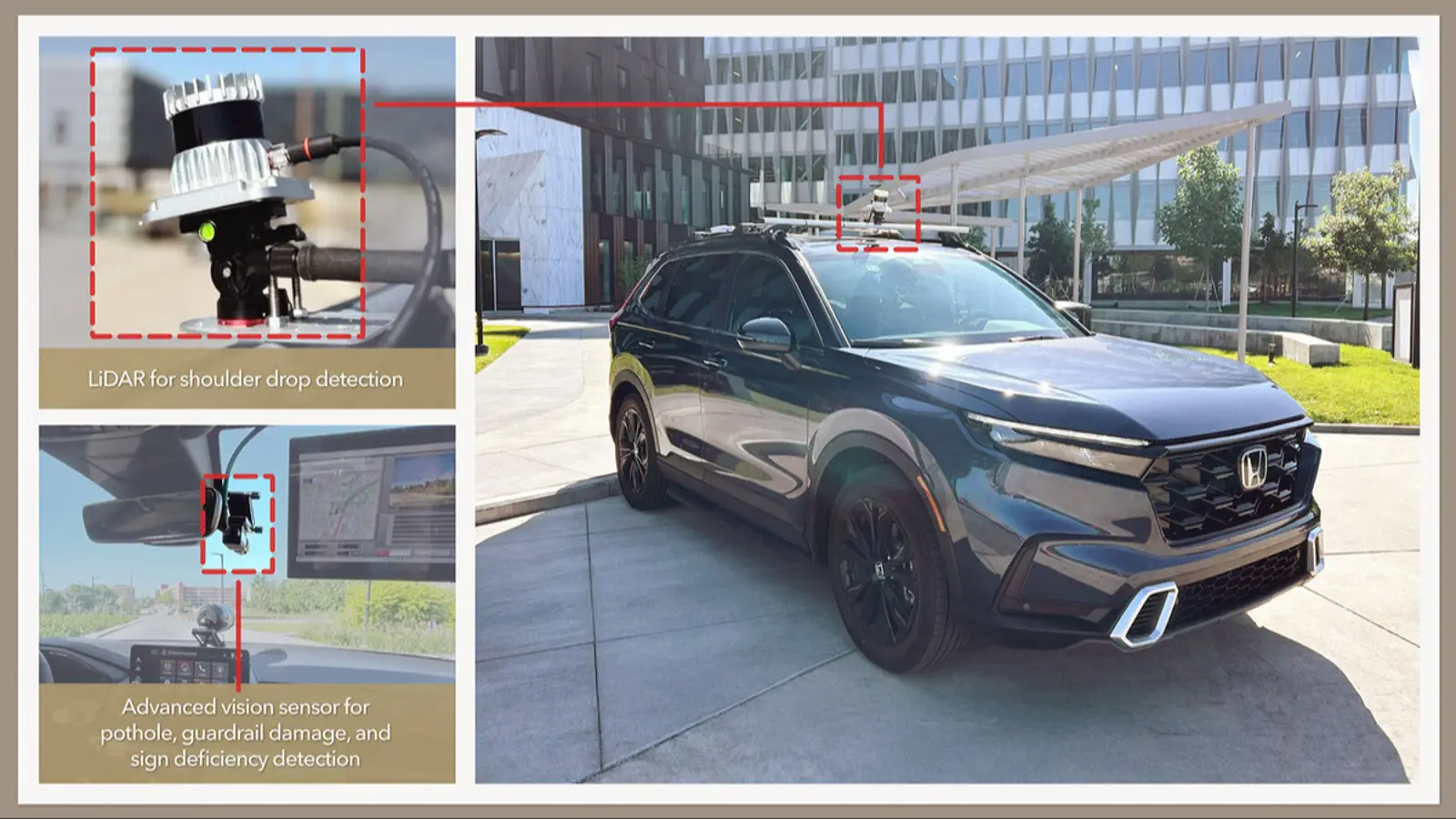
このコンセプトは、現代の車両にすでに搭載されているセンサーを活用しています。運転支援システムに使われるカメラやLiDARを転用し、通常の走行中に道路状況や路側設備を記録しました。収集されたデータは人工知能で処理され、クラウドベースのプラットフォームに送信。そこで修理タスクが自動生成され、優先順位が付けられます。その結果、道路作業員が問題を探して走り回る必要がなくなり、システムが問題を特定し緊急度を評価するようになりました。
パイロットプロジェクトはオハイオ州中部および南東部の約3,000マイルの道路を対象としました。システムは舗装の穴、損傷したガードレール、欠落または劣化した道路標識、舗装の問題、その他の危険を検出。ガードレールの検出精度は93%、舗装の穴は89%、道路標識は最大99%に達しました。これにより修理が加速しただけでなく、最も重要な安全問題から優先的に対処できるようになりました。
このプロジェクトの重要性は、インフラの規模を考えるとより明確になります。ODOTは43,000以上の車線マイルの道路を管理しており、米国最大級の州間高速道路網を有しています。このような環境では、従来の検査方法には多大なリソースが必要ですが、自動化された監視は保守管理に根本的に異なるアプローチを提供します。
財務的影響も同様に注目に値します。プロジェクトの推定では、大規模展開により年間450万ドル以上の節約が可能で、主に手動検査の削減と効率的な計画立案によって実現します。問題がより高額なトラブルに発展する前に、早期に修理を実施できるようになります。
安全性も重要な要素です。道路検査は、狭い道路や交通量の多い区域など危険な条件下で行われることが少なくありません。欠陥検出を自動化することで、このシステムは手動検査の必要性を減らし、路側作業員のリスク低減に貢献します。
このプロジェクトは2021年から開発が進められ、パーソンズ、アイプローブ、シンシナティ大学など複数のパートナーが参加しました。彼らの協力により、データ収集、分析、インフラ管理が単一のワークフローで結びついたシステムが構築されました。
今後の展望として、ホンダはすでにオハイオ州以外でもシステムを拡大するため、複数の州と協議を進めています。将来的には、日常的に走行する一般車両がデータを提供する、より広範な参加形態も考えられます。参加は任意のままであり、収集されるデータは位置情報や検出された道路問題など必要最小限の要素に限定されます。
大規模に採用されれば、このモデルは道路を継続的に監視されるシステムへと変革する可能性があります。そのシステムは、毎日利用している車両そのものに依存する形で機能するのです。
Mark Havelin
2026, 4月 15 21:15